Via 3D-CAD zum humanoiden Robotermodell
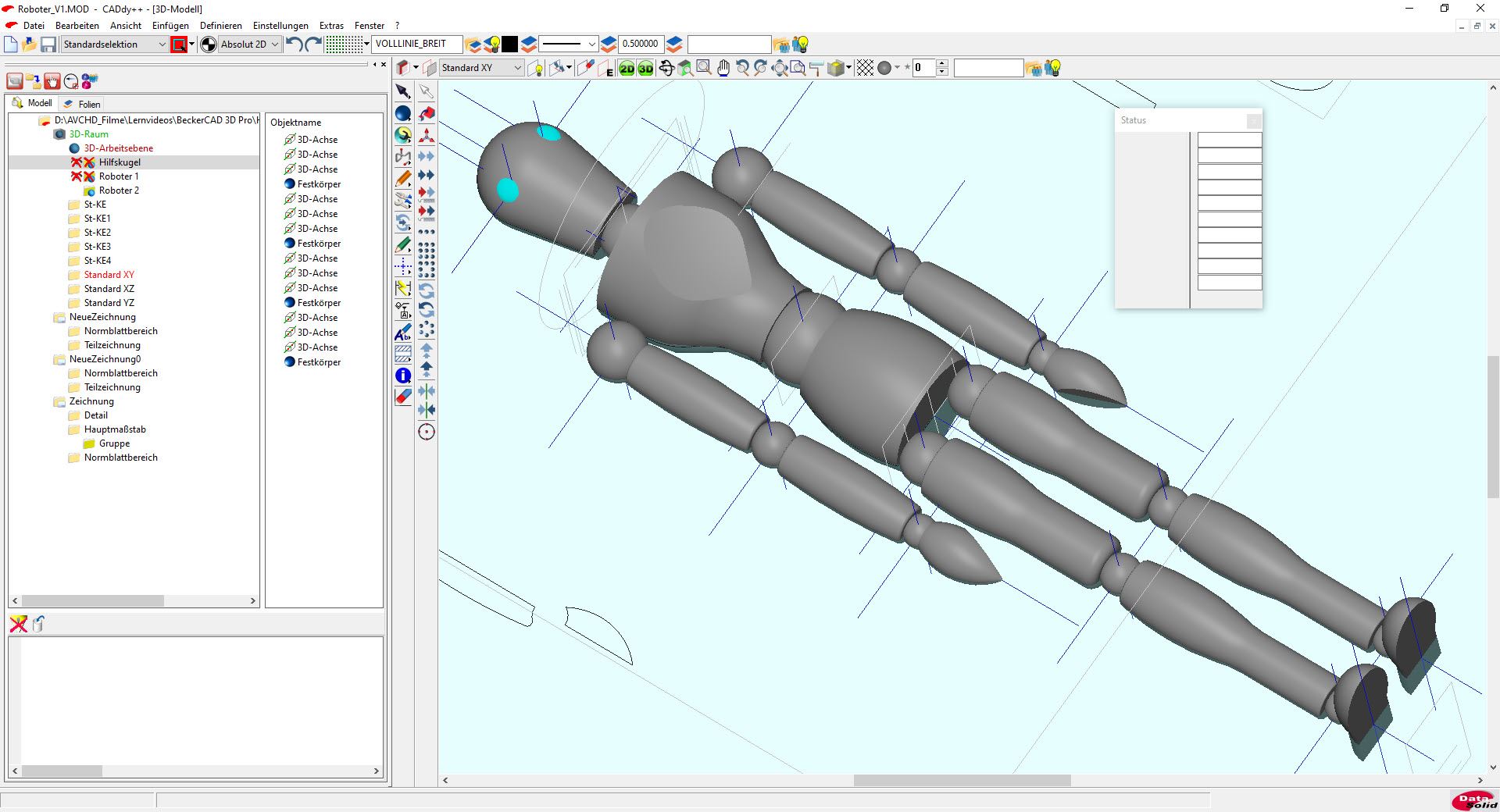
Ob Küchengerät, Flugzeug oder Automotor – mittels 3D-CAD-Programmen werden anspruchsvolle technische Projekte mühelos und zügig umgesetzt. Dass dazu nicht unbedingt ein hochpreisiges Produkt nötig ist, zeigt ein humanoider Roboter, der mit BeckerCAD 3D Pro erstellt wurde.
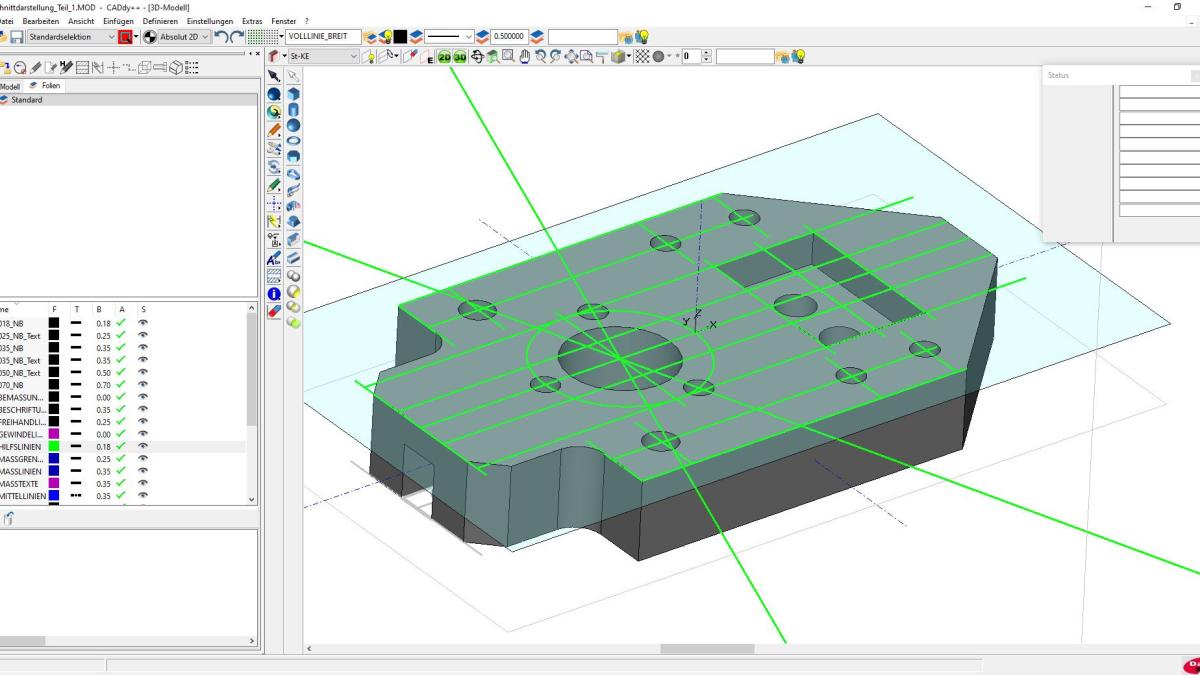
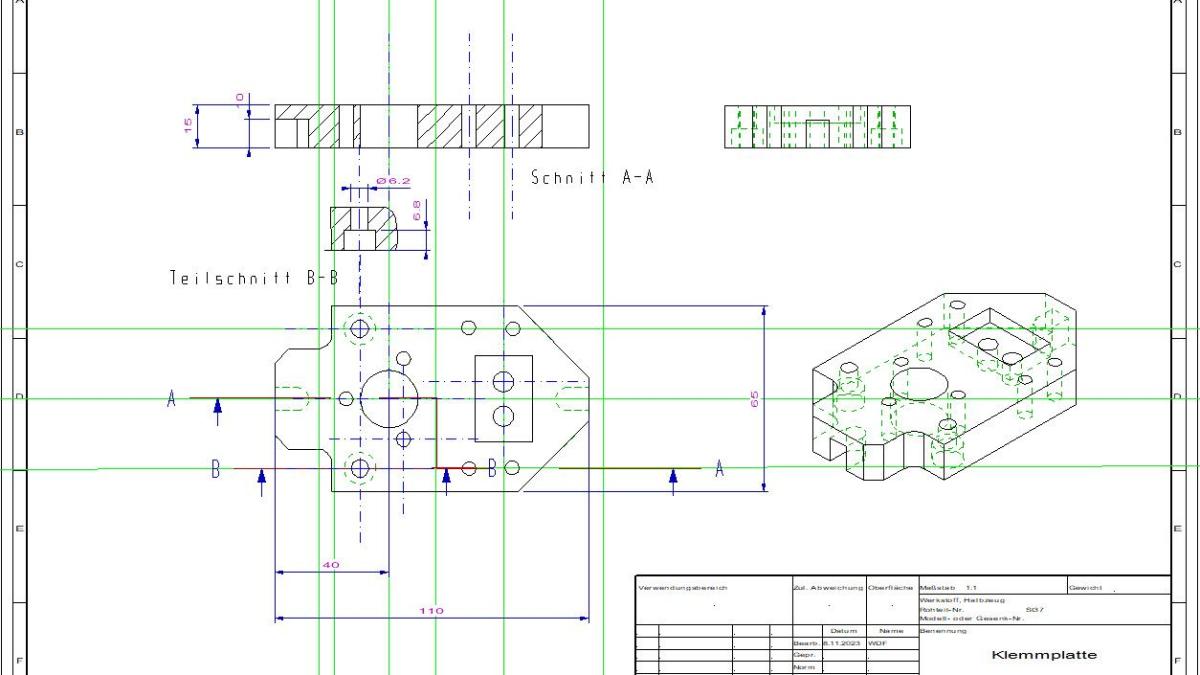
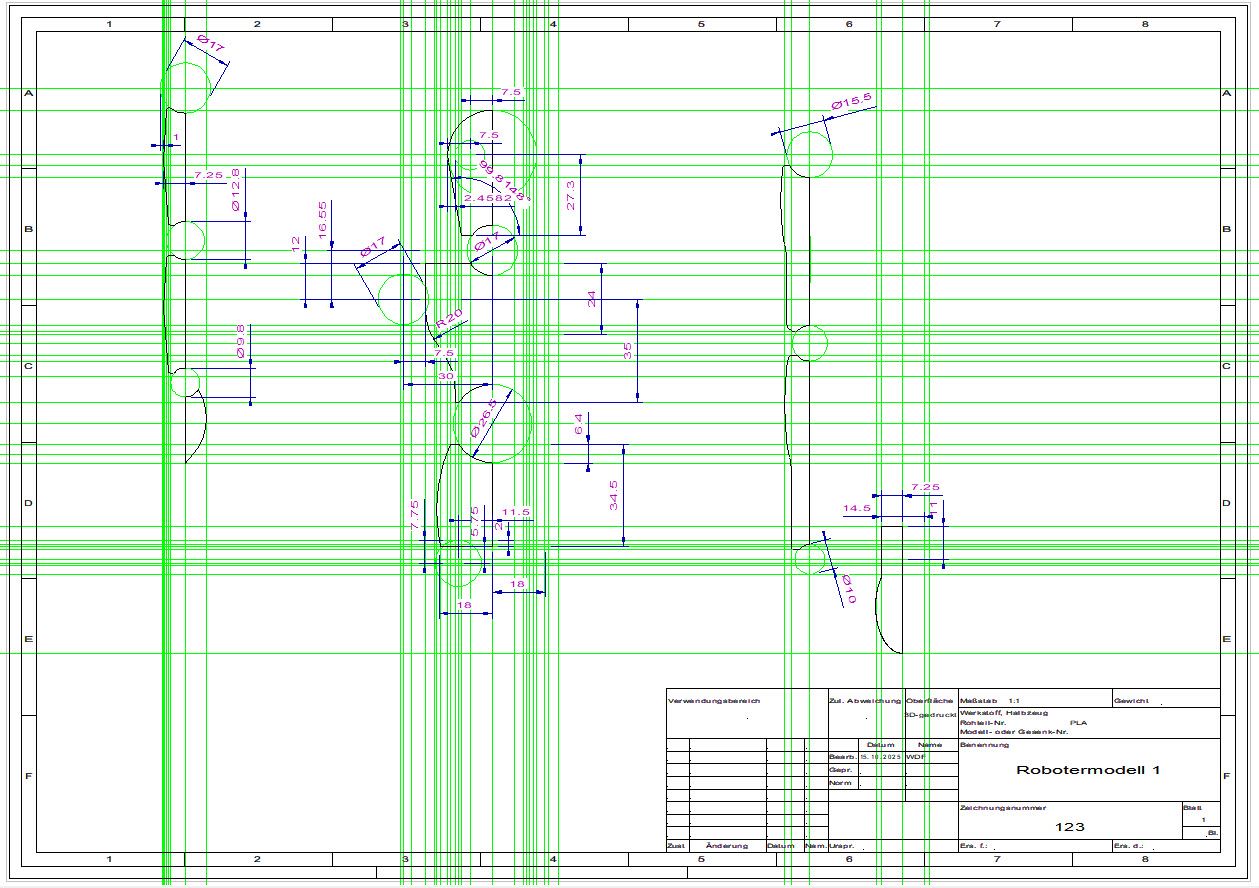
3D-CAD-Systeme haben reine 2D-CAD-Programme schon lange aus den Konstruktionsbüros verdrängt, da diese nicht zuletzt im Fall umfangreicher Konstruktionen in wesentlich kürzerer Zeit ans Ziel führen. Wie bereits das preiswerte BeckerCAD 3D Pro zeigt, sind diese Systeme in der Lage, aus einem 3D-Volumenmodell in Sekundenbruchteilen eine sogenannte Dreitafelprojektion zu erstellen, die anschließend bemaßt werden kann.
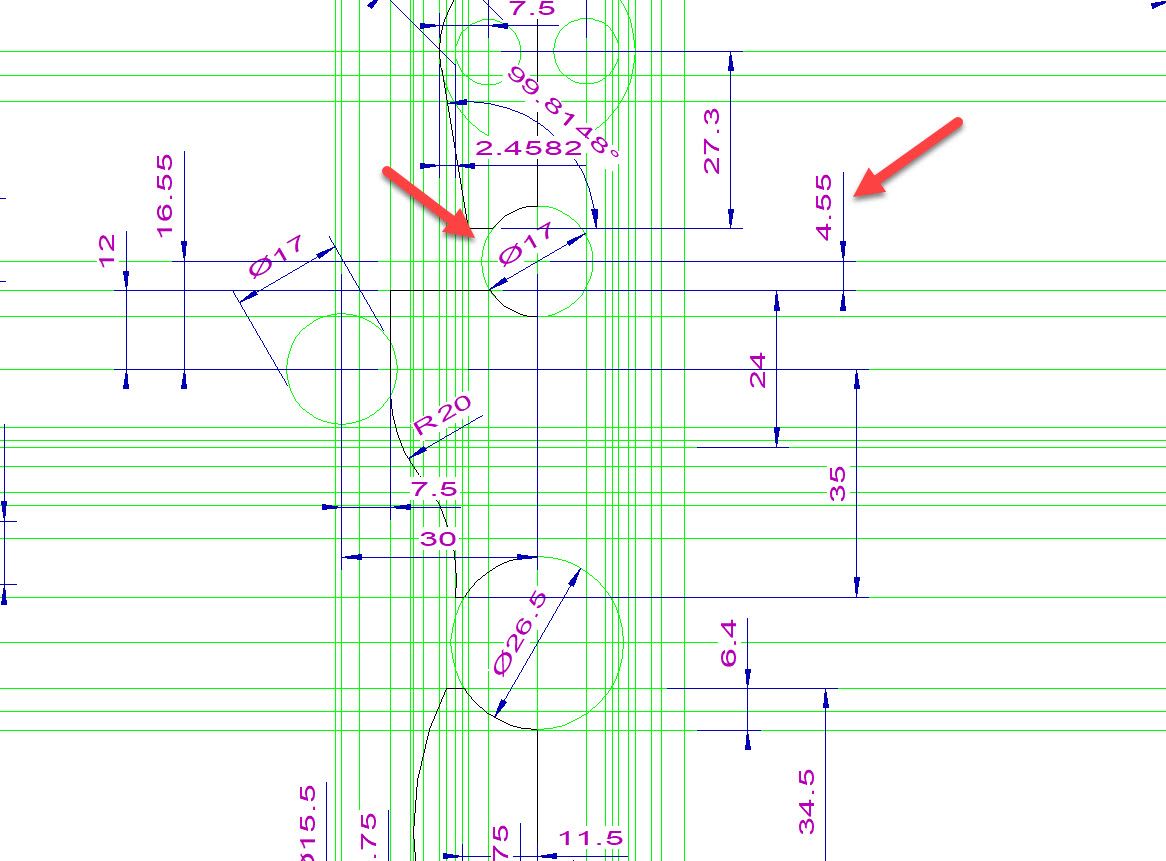
Da es einer gewissen Übung bedarf, um ein Robotermodell zu konstruieren, ist es sinnvoll, sich zunächst ein fertiges Kunststoff- oder Holzmodell zu besorgen, von dem mit entsprechenden Messwerkzeugen die Maße abgenommen werden.

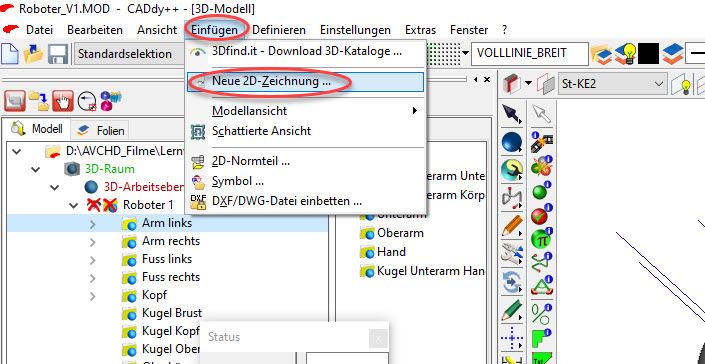
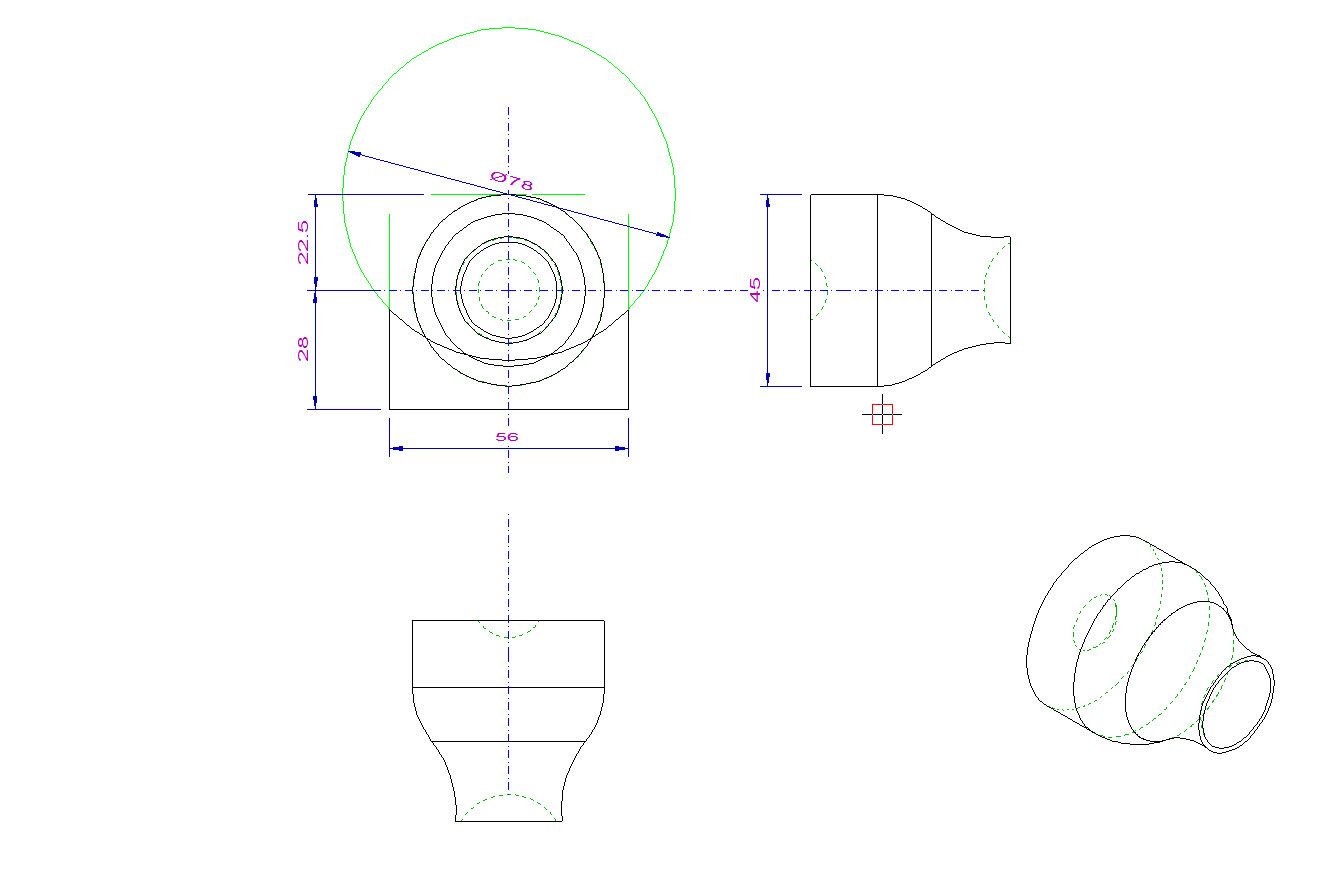
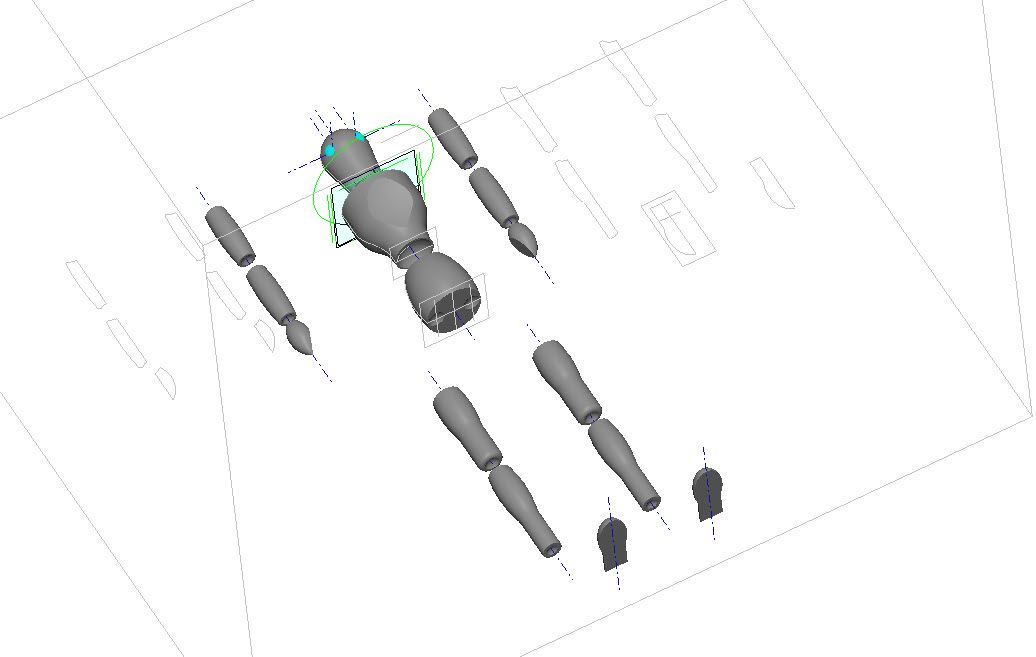
Da viele Teile des Roboters rotationssymmetrisch sind, können diese sehr einfach mittels der Festkörperfunktion „Rotationskörper“ aus einer 2D-Zeichnung abgeleitet werden. Für eine spätere problemlose Montage über die Transformieren-Funktion „Körper neu positionieren“ ist allerdings zu beachten, dass diese 2D-Zeichnungen aufeinander abgestimmt werden. Deshalb macht es Sinn, diese zunächst gemeinsam zu entwickeln sowie maßlich abzustimmen, ehe diese in die Volumenkörper rotiert werden.
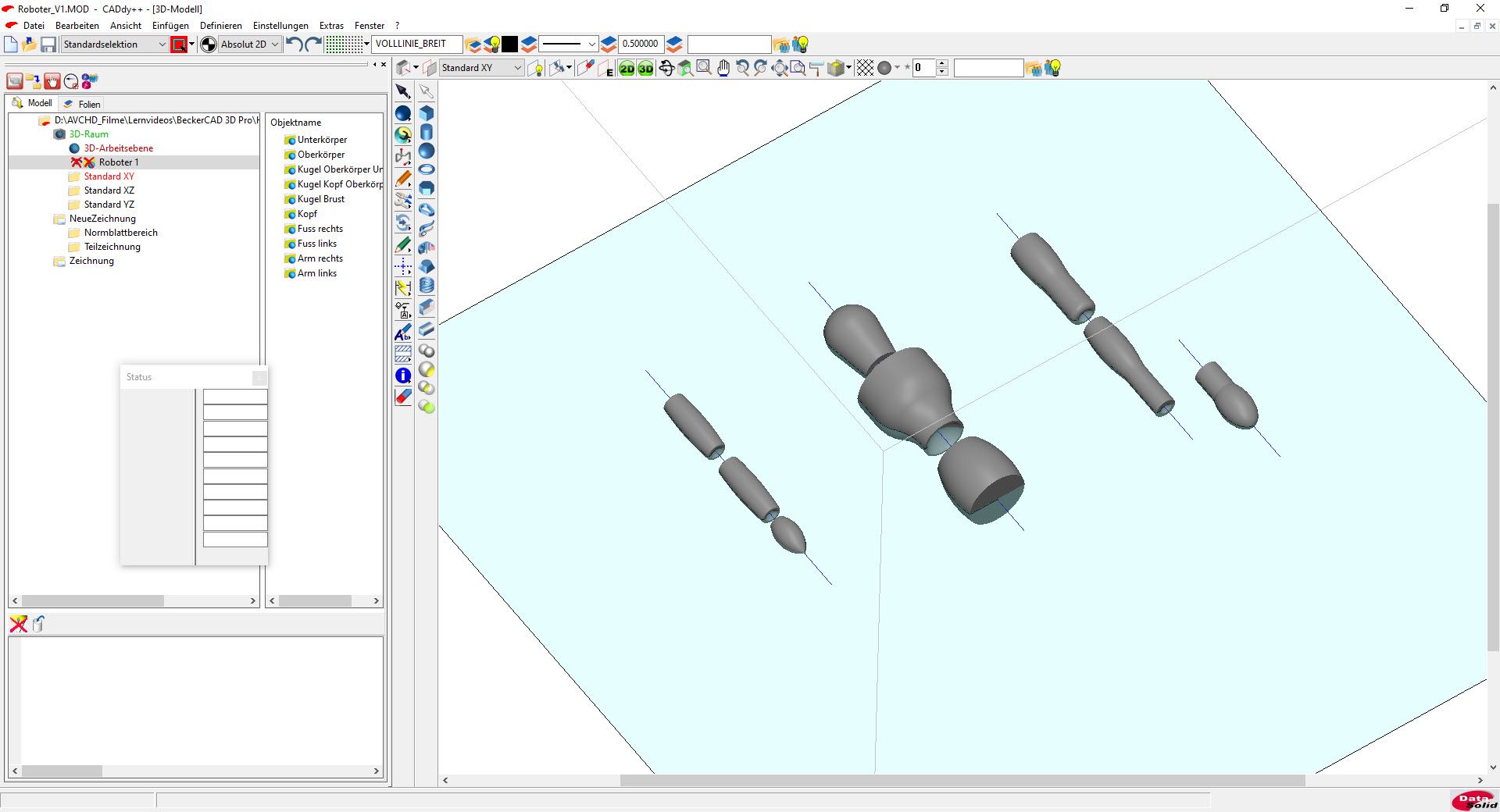
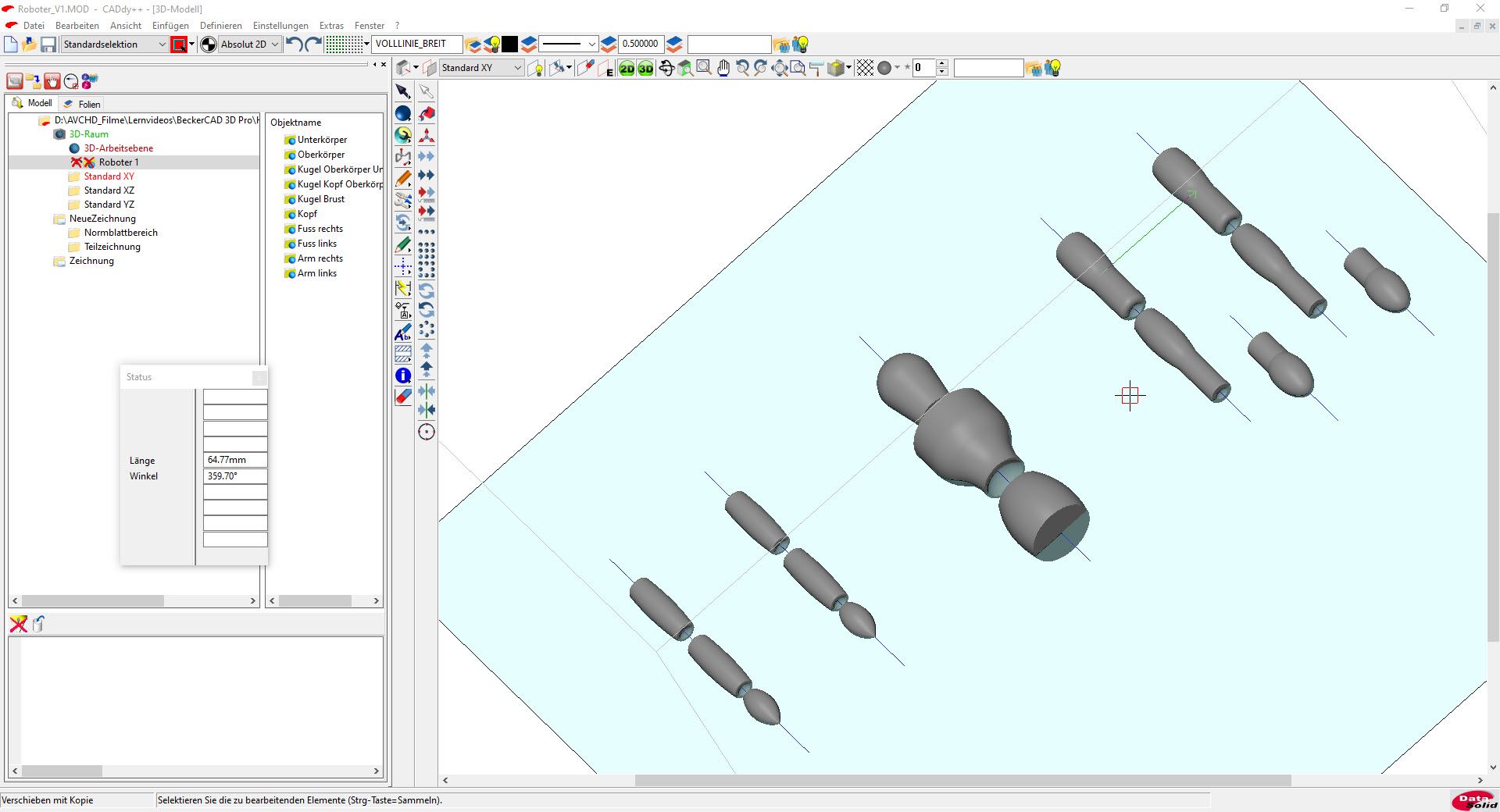
Arme und Beine sind jeweils nur einmal vorhanden. Aus diesem Grund müssen diese kopiert werden, was über die Transformier-Funktion „Verschieben mit Kopie“ vonstattengeht. Um während der Konstruktion Körperteile bei Bedarf einfacher Ein- und Ausblenden zu können, sollte der Modellbaum genutzt werden.
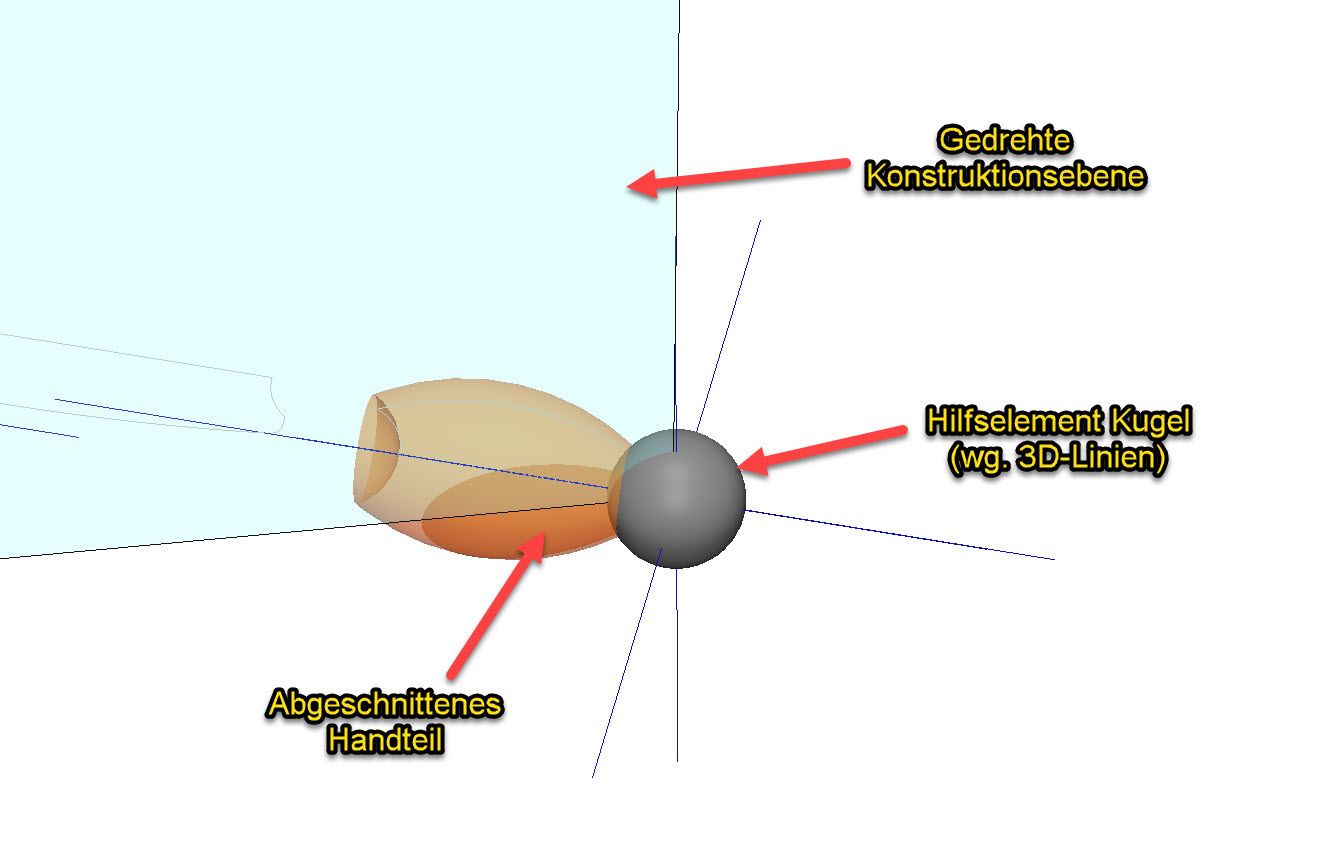
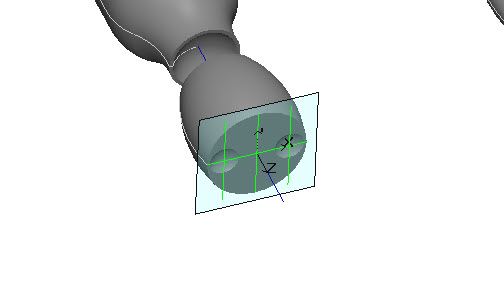
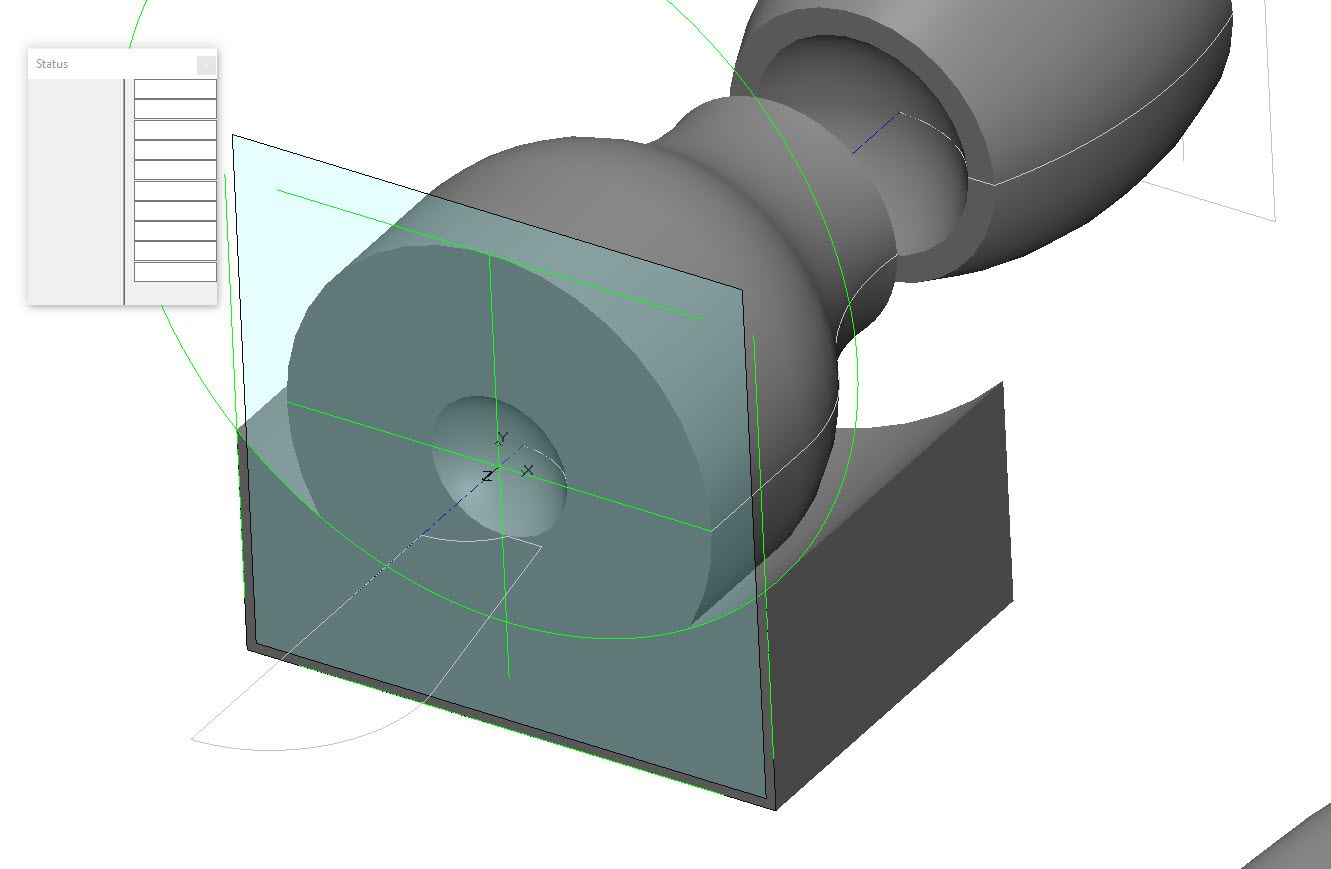
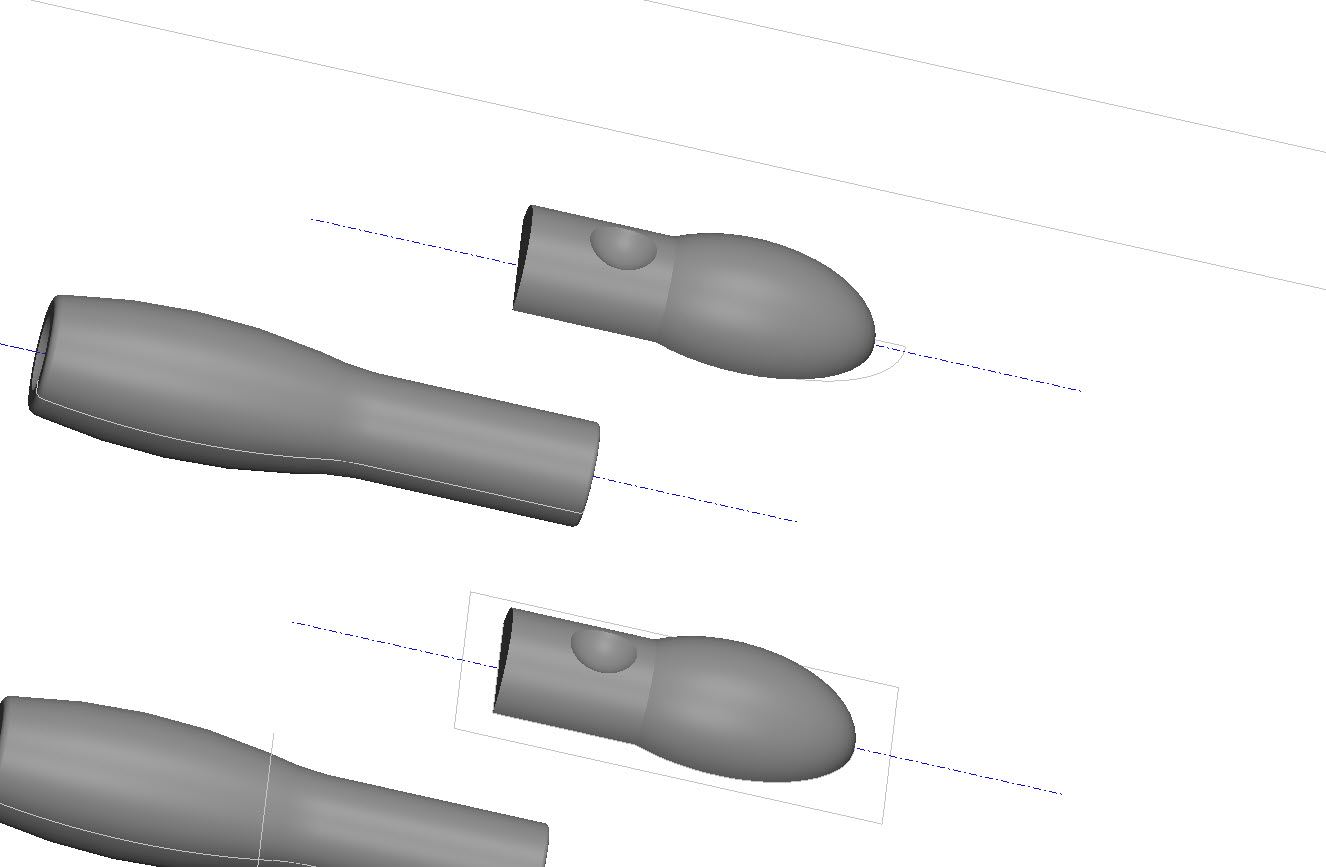
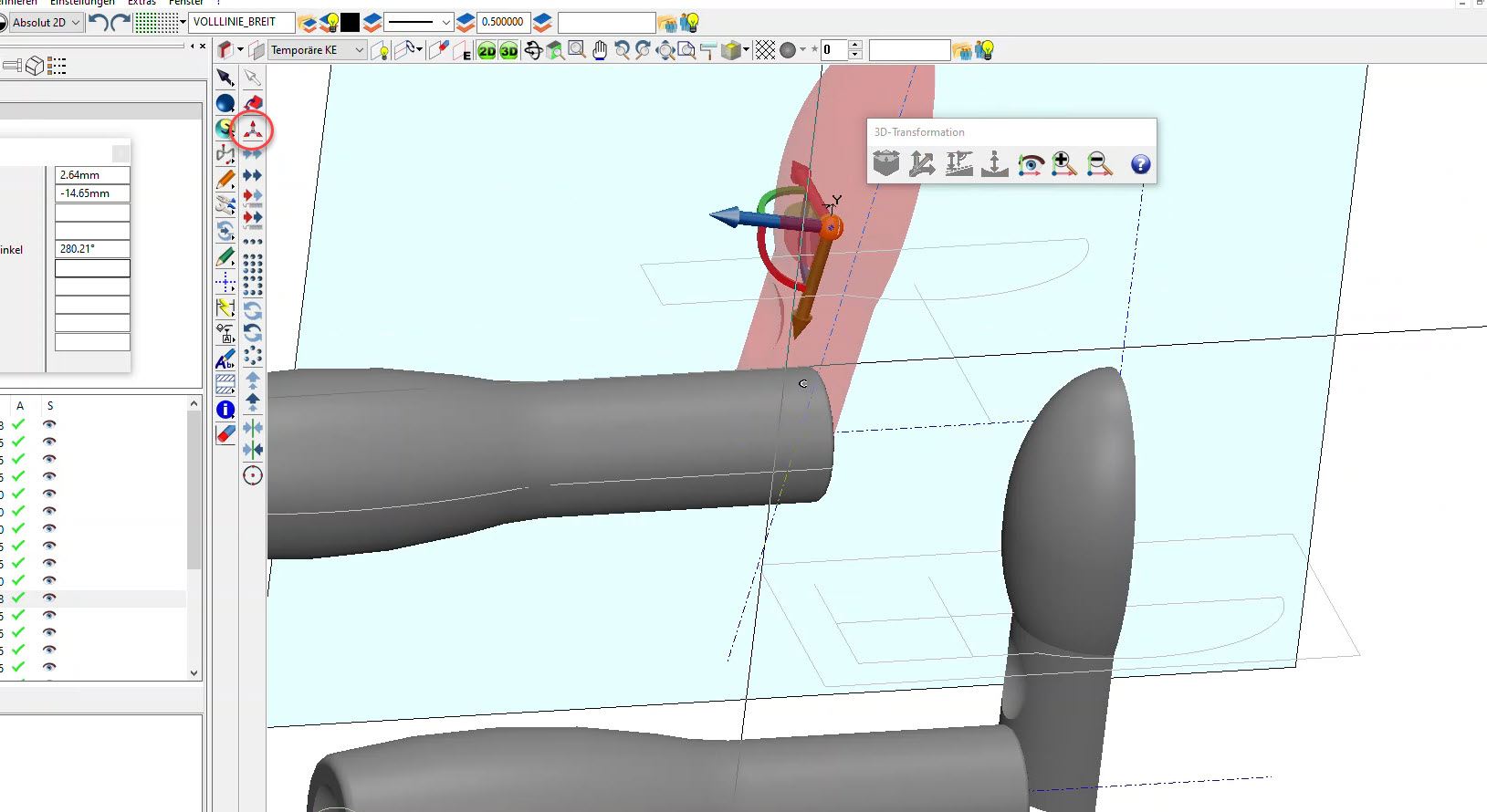
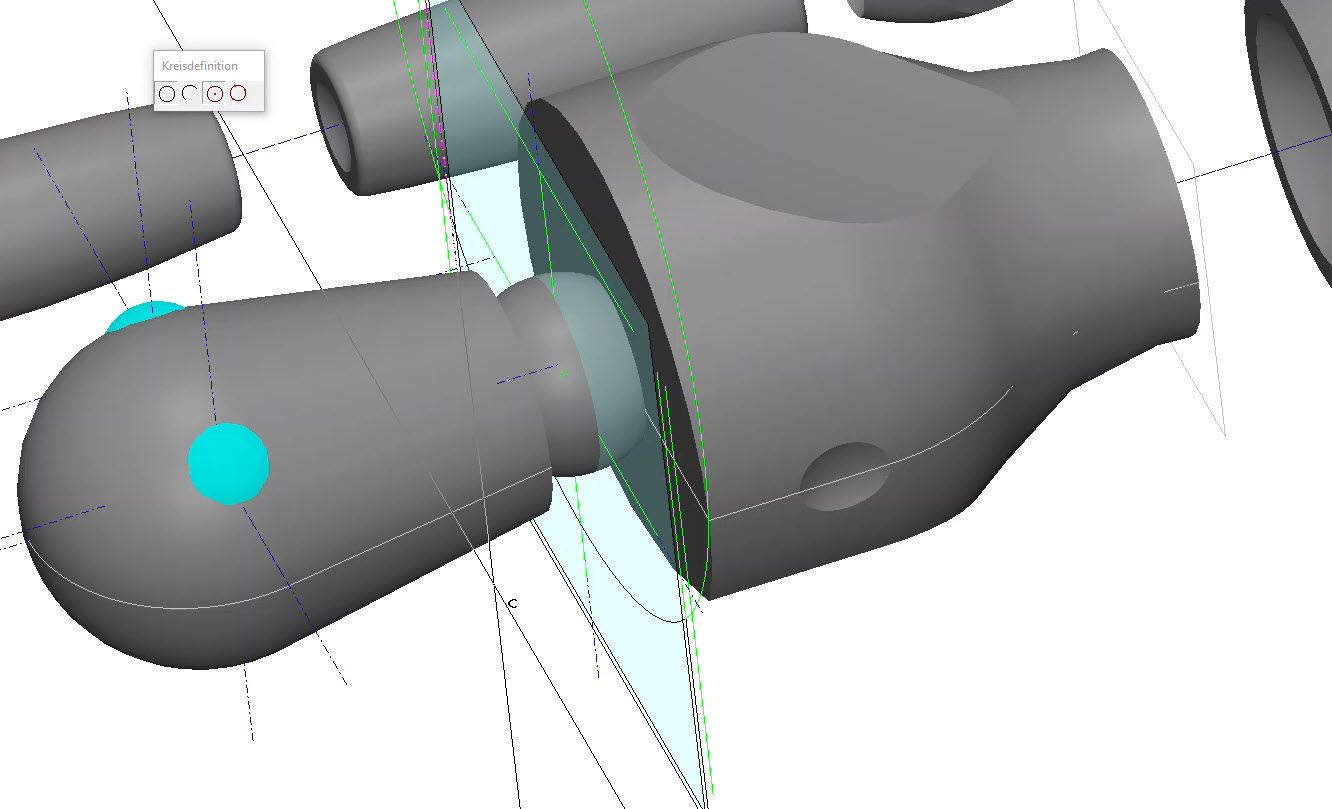
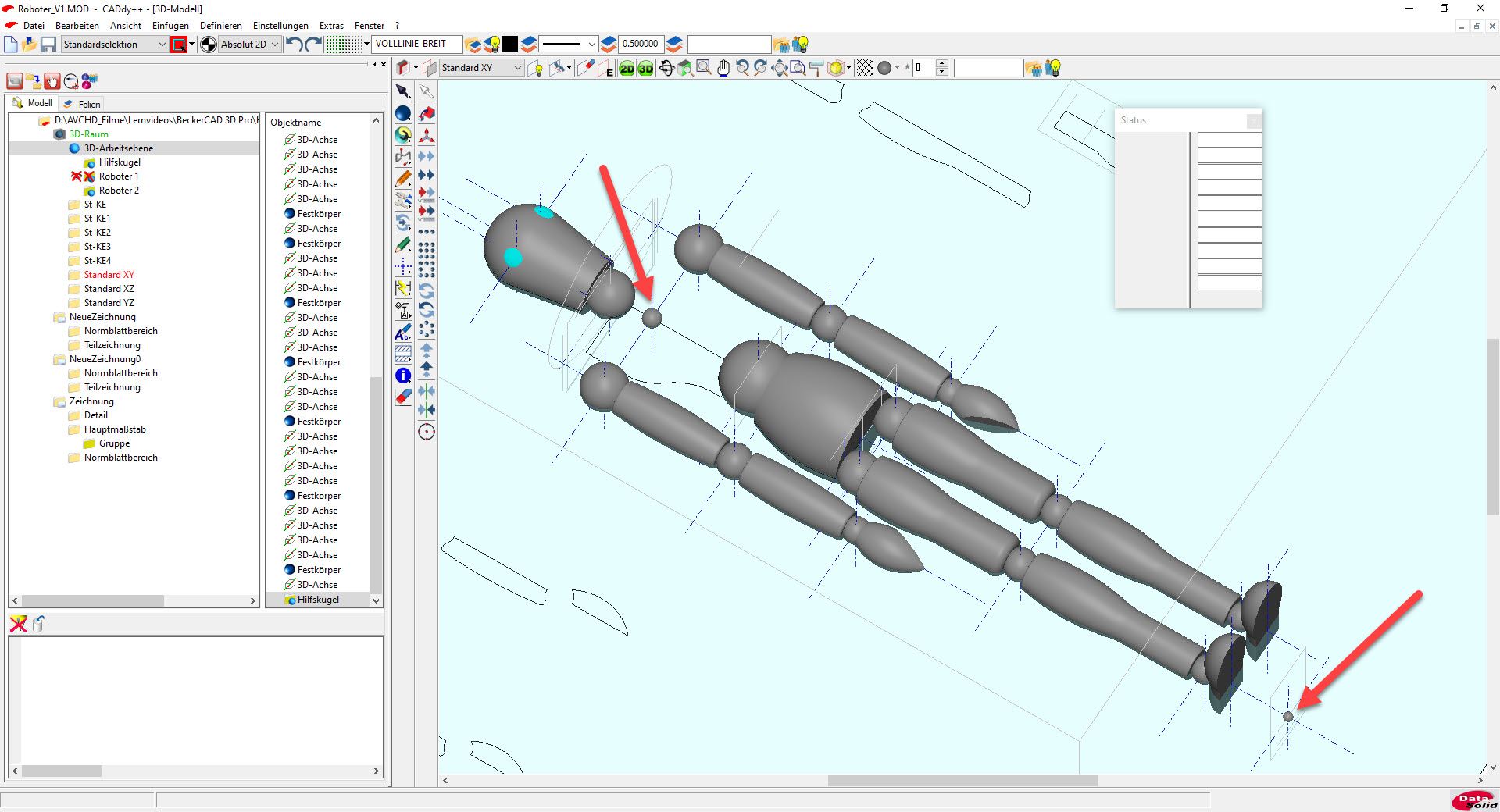
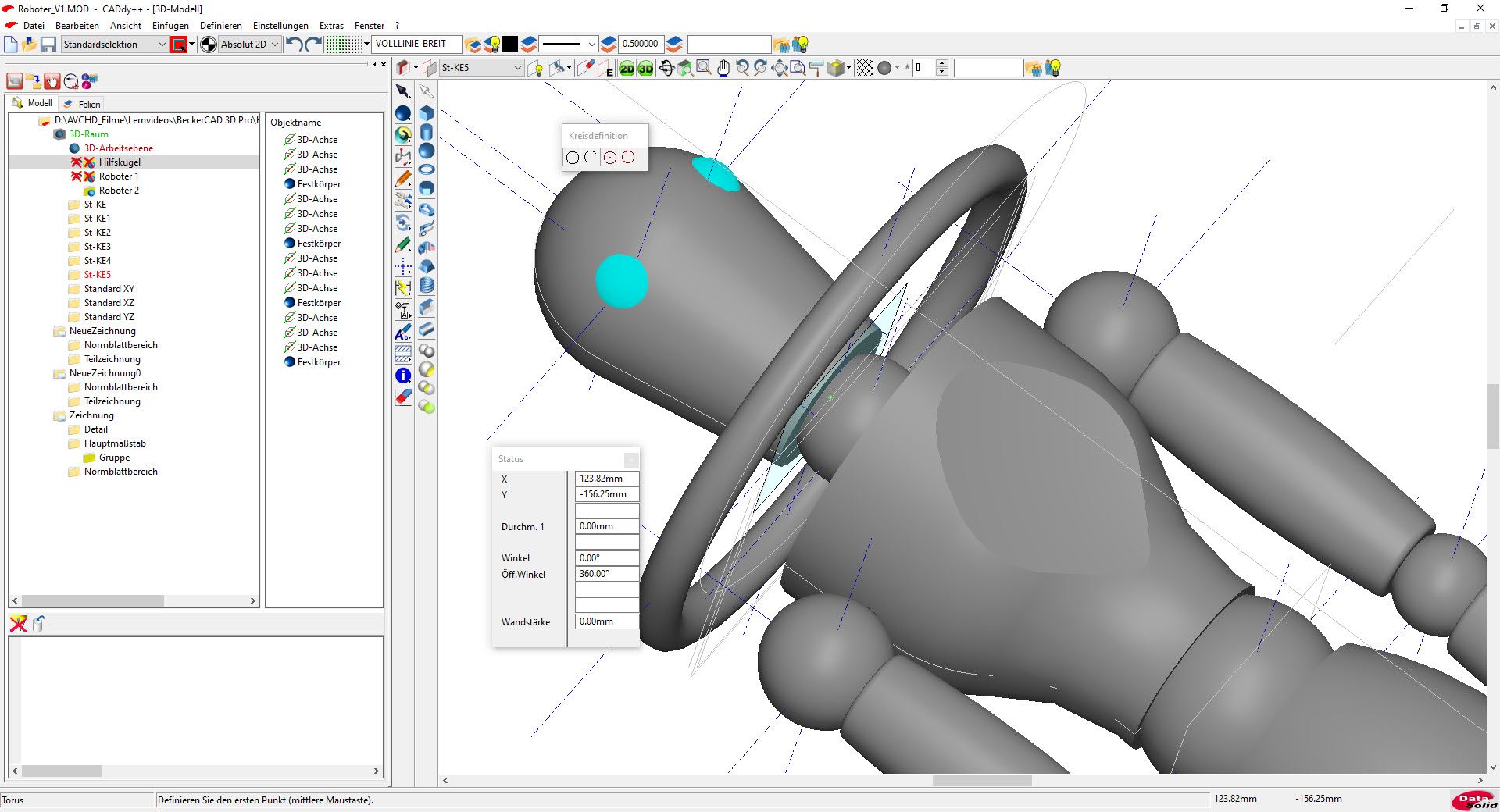
Links und rechts soll der Roboter spiegelbildlich zugeschnittene Hände erhalten. Dazu werden diese mittels einer um jeweils 70 Grad gedrehten Konstruktionsebene über die Funktion „Körper an Ebene trennen“ entsprechend zugeschnitten. Die Konstruktionsebenen selbst werden dabei über die Funktion „KE über Fläche/Kante/Achse definieren“ erzeugt.
Die Herausforderung ist in diesem Fall, dass eine Lösung gefunden werden muss, die Konstruktionsebene um die Y-Achse zu drehen, was mit einer Kugel als Hilfselement gelingt.
Die Vorgehensweise ist wie folgt:
1. Konstruktionsebene erzeugen, wobei die Funktion „Autofang“ zu nutzen ist (mittlere Maustaste)
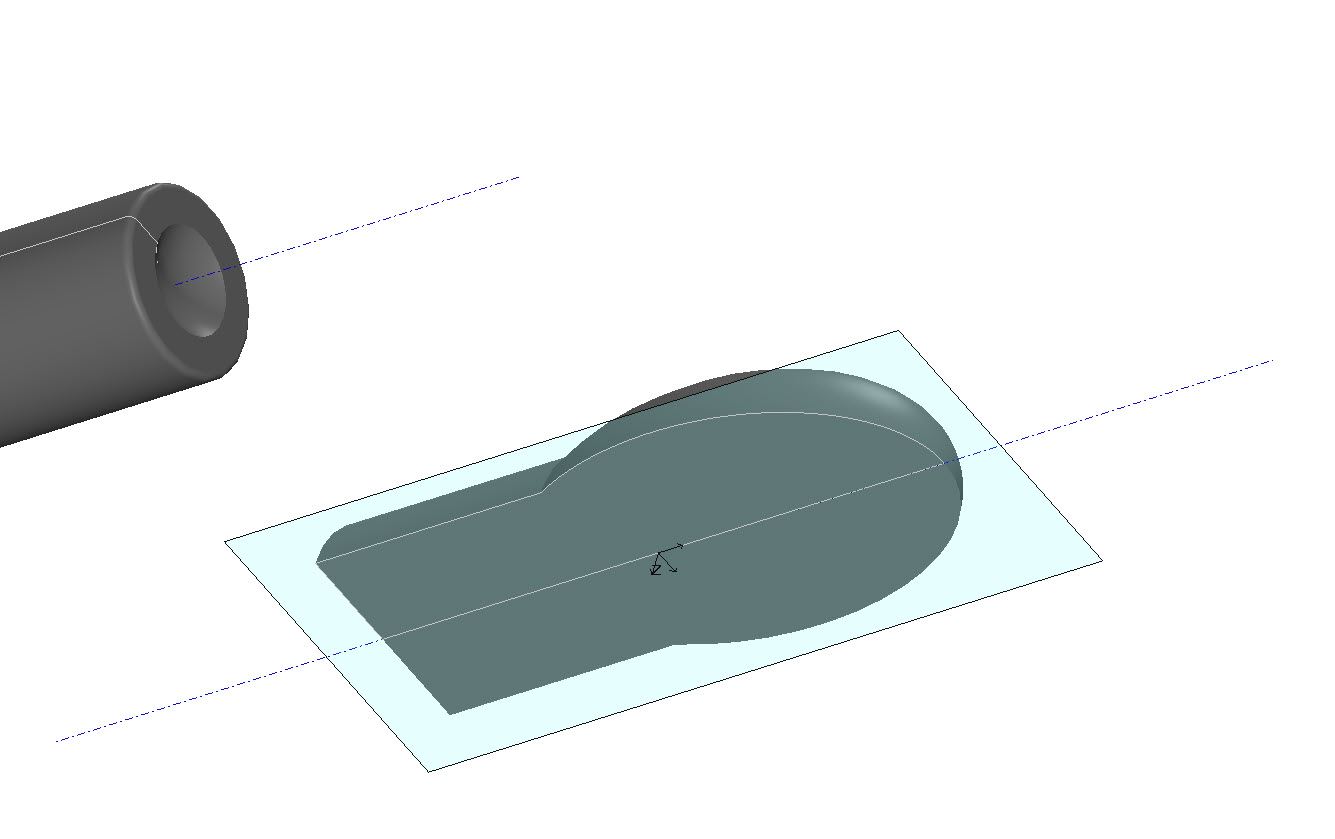
2. Kugel mittels „Autofang“ erzeugen.
3. Konstruktionsebene mittels der Funktion „KE um Achse drehen“ um 70 Grad um die Y-Achse drehen. Dabei als ersten Punkt den Körperschwerpunkt der Kugel wählen, als zweiten Punkt den Endpunkt der 3D-Achse und als Startpunkt wiederum den Körperschwerpunkt der Kugel bestimmen.
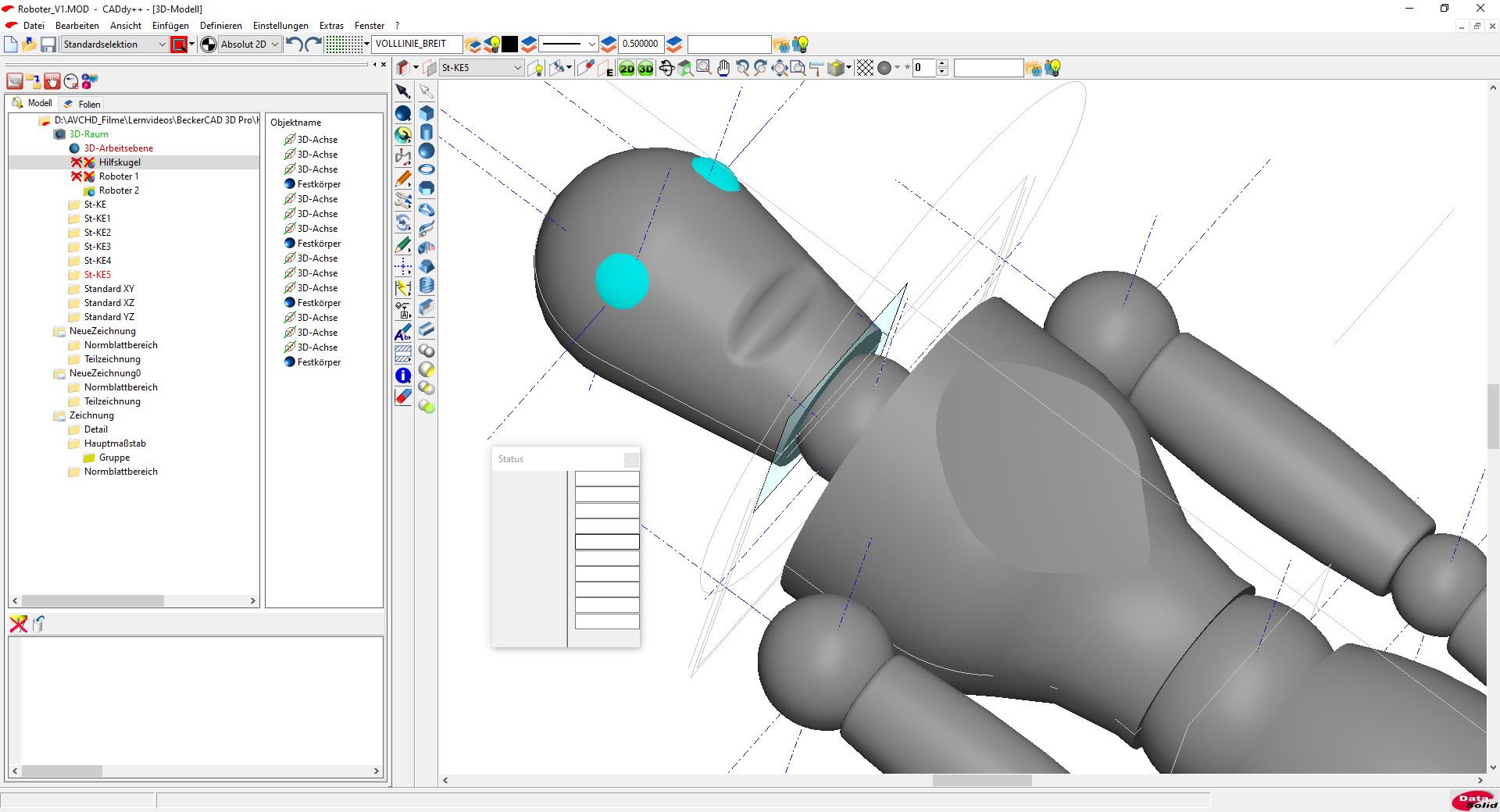
4. Mittels der Funktion „Körper an Ebene trennen“ kann der nicht benötigte Teil der Hand abgetrennt und per Löschwerkzeug zusammen mit der Hilfskugel entfernt werden.
5. Den Vorgang an der anderen Hand wiederholen.
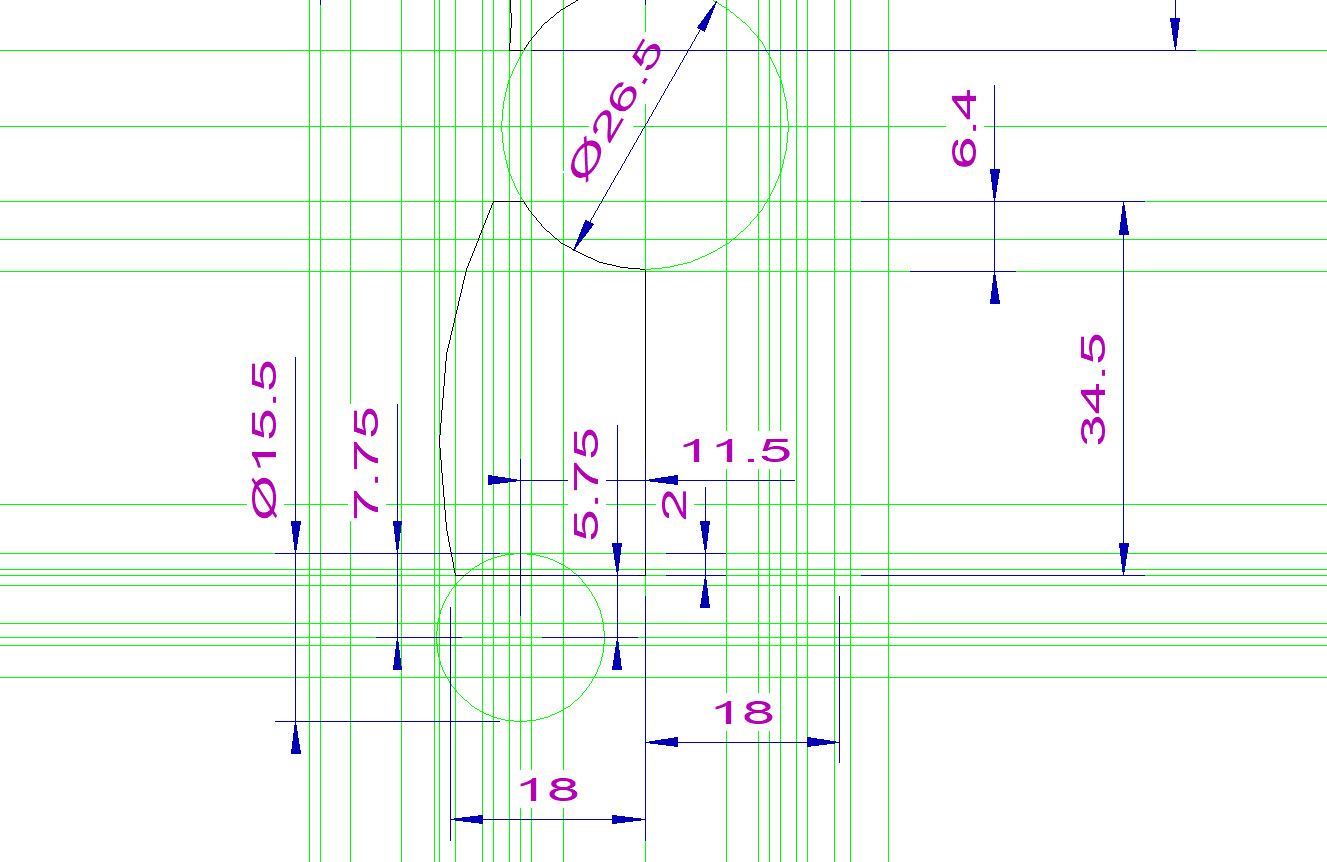
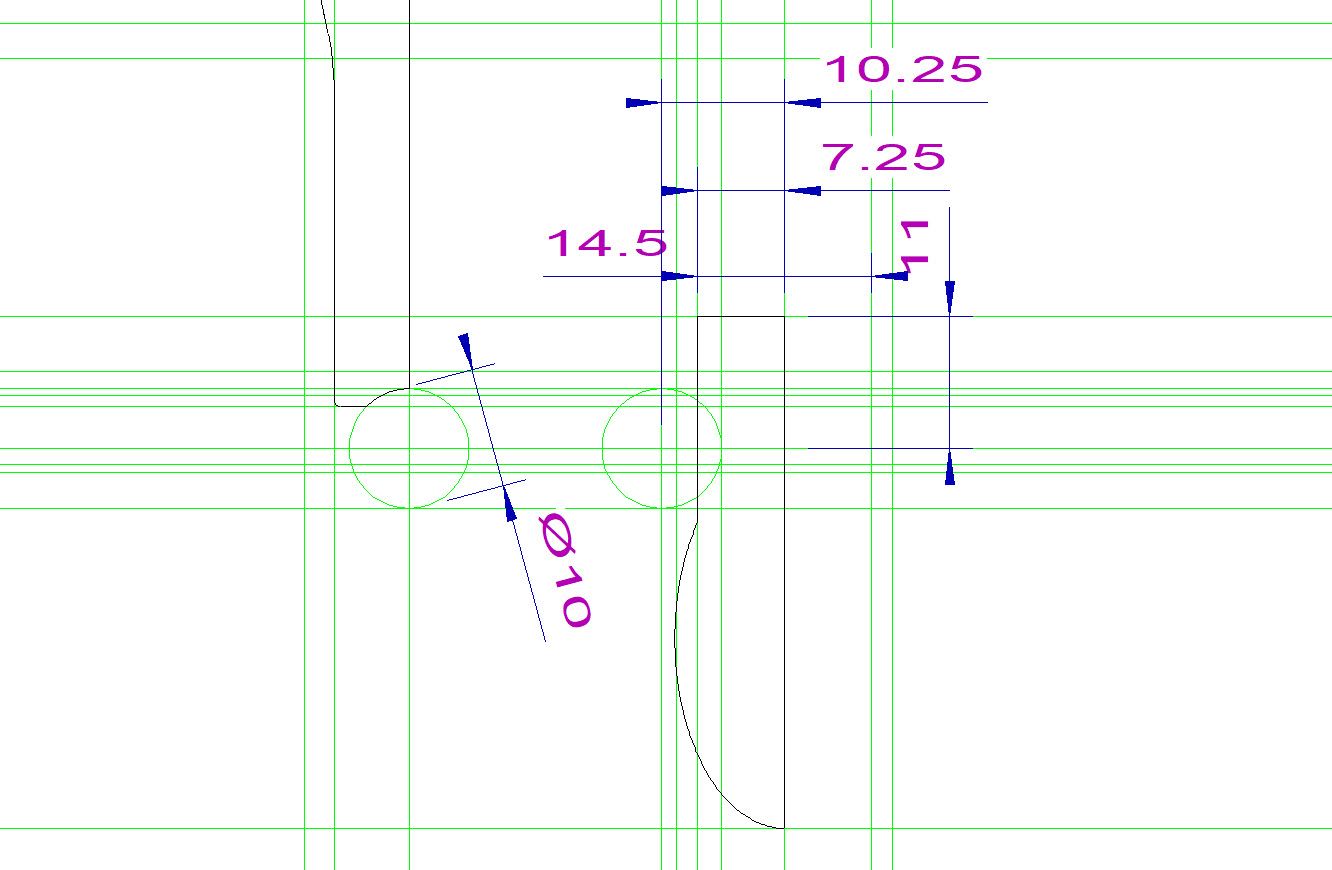
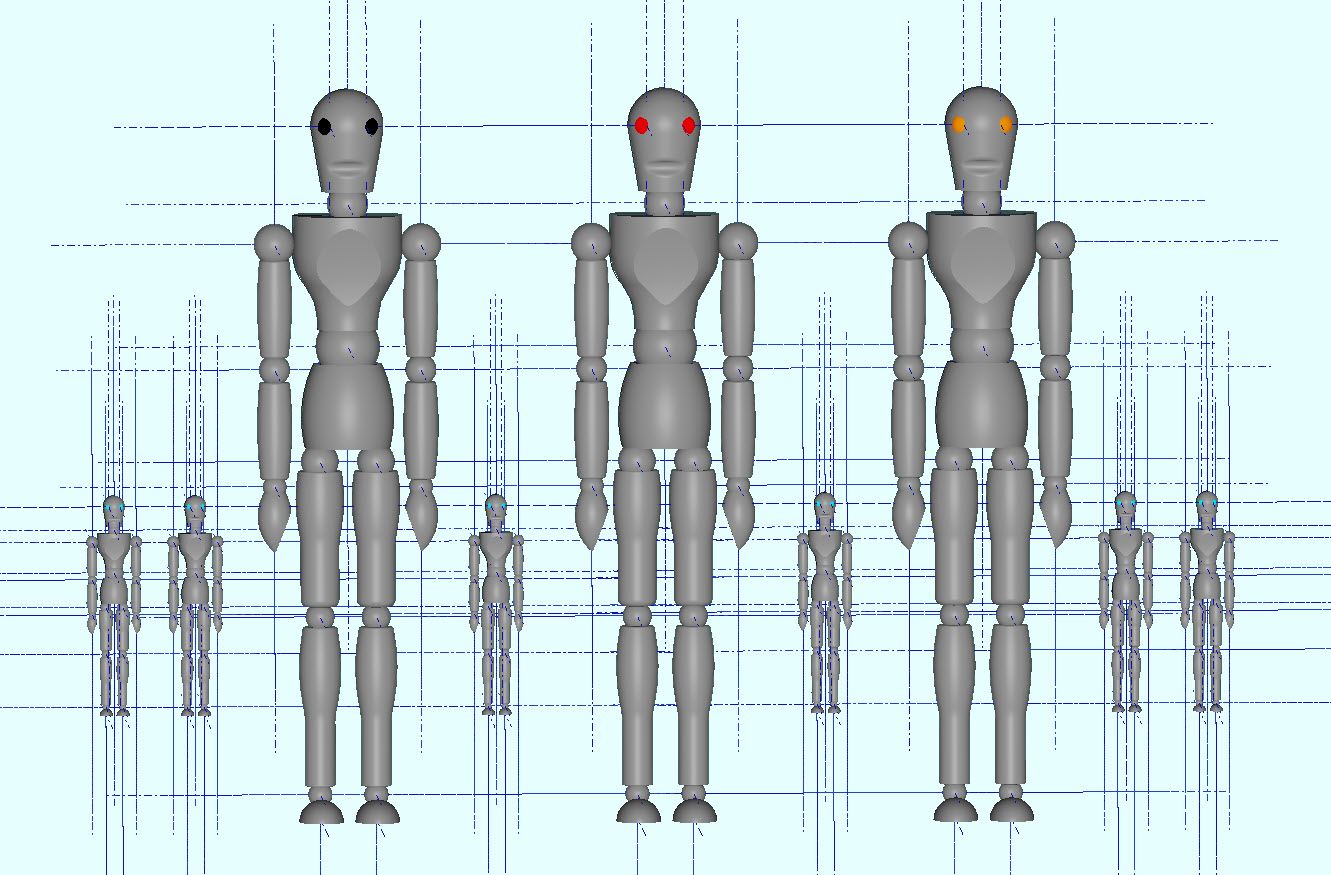
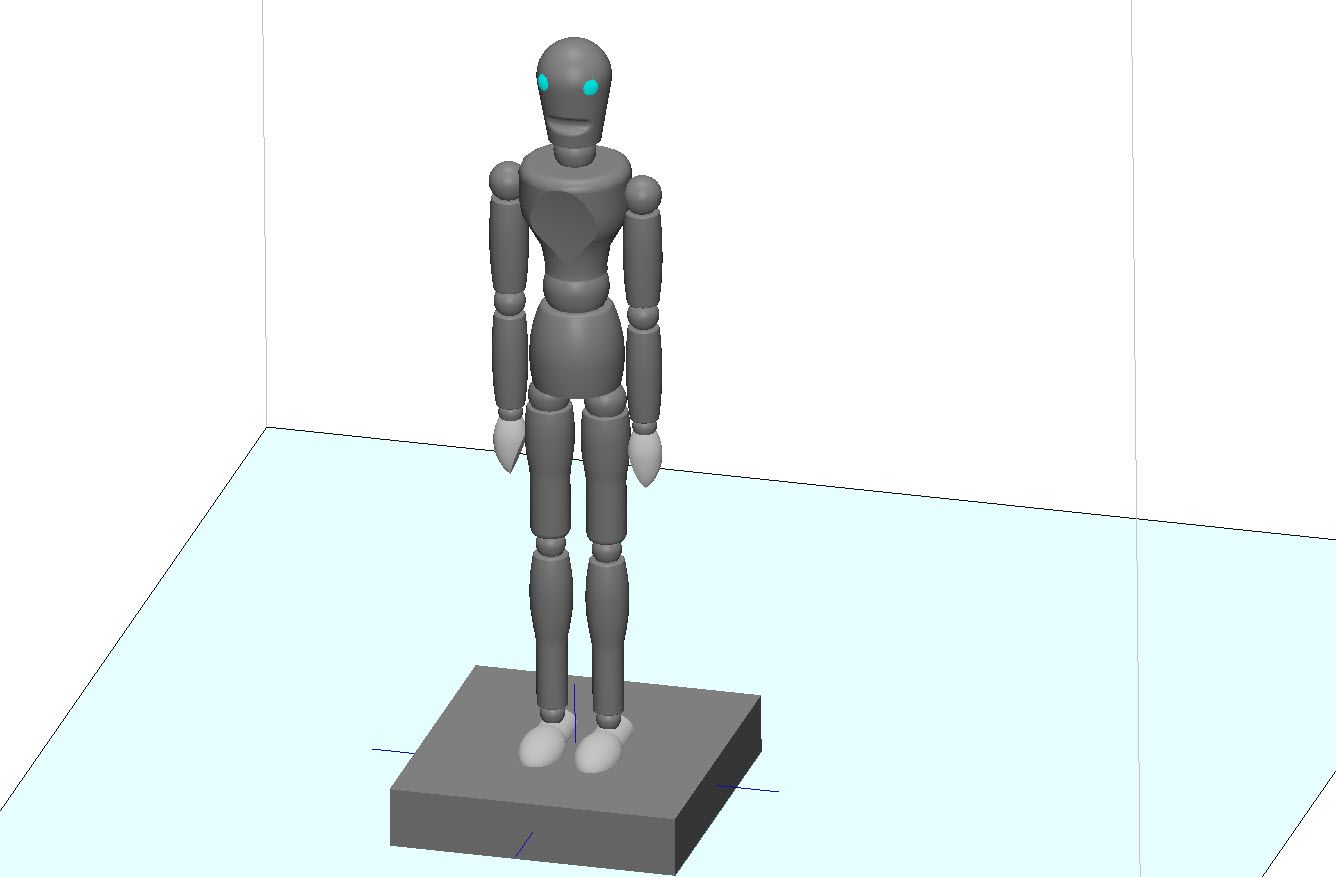
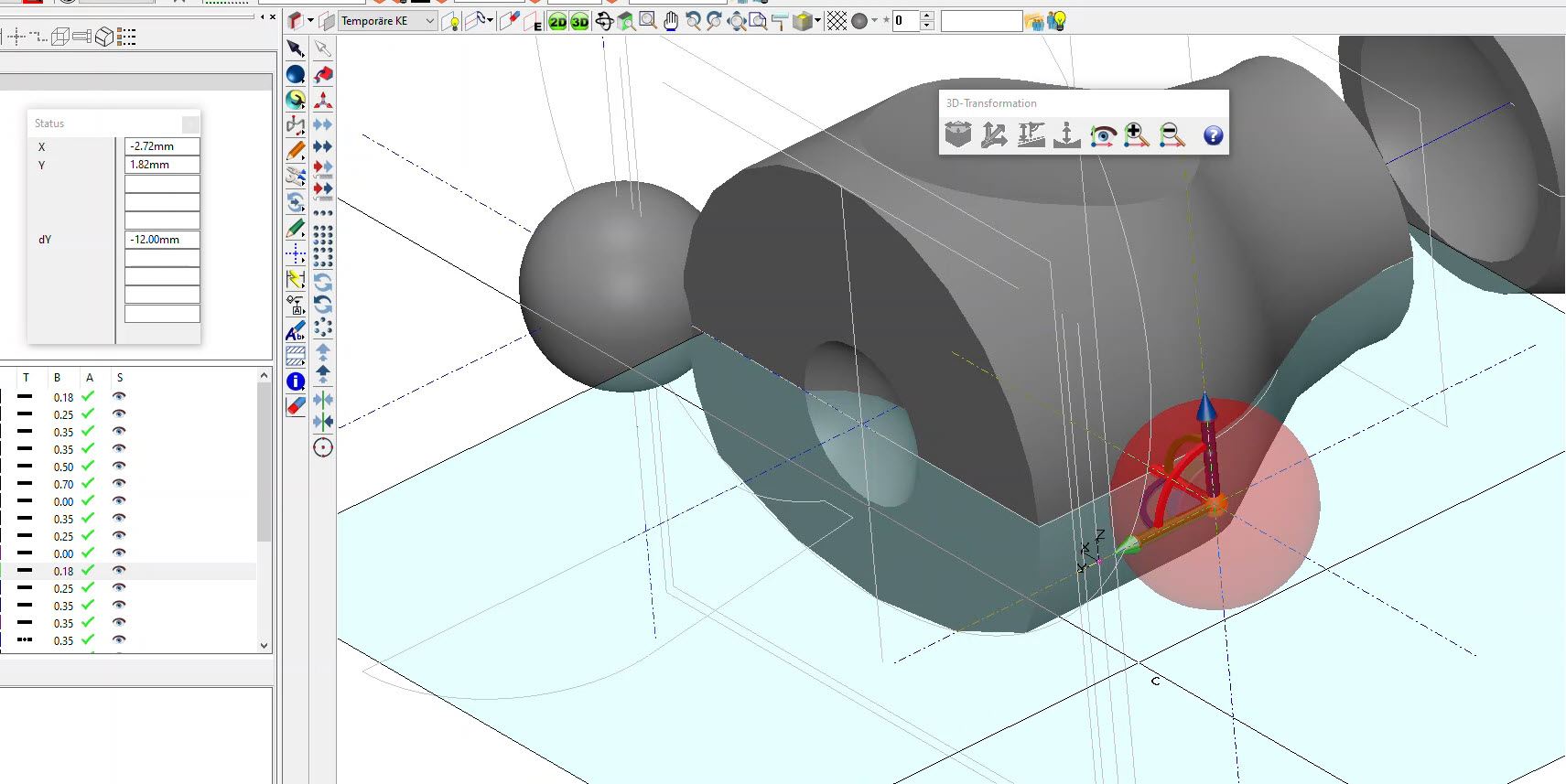
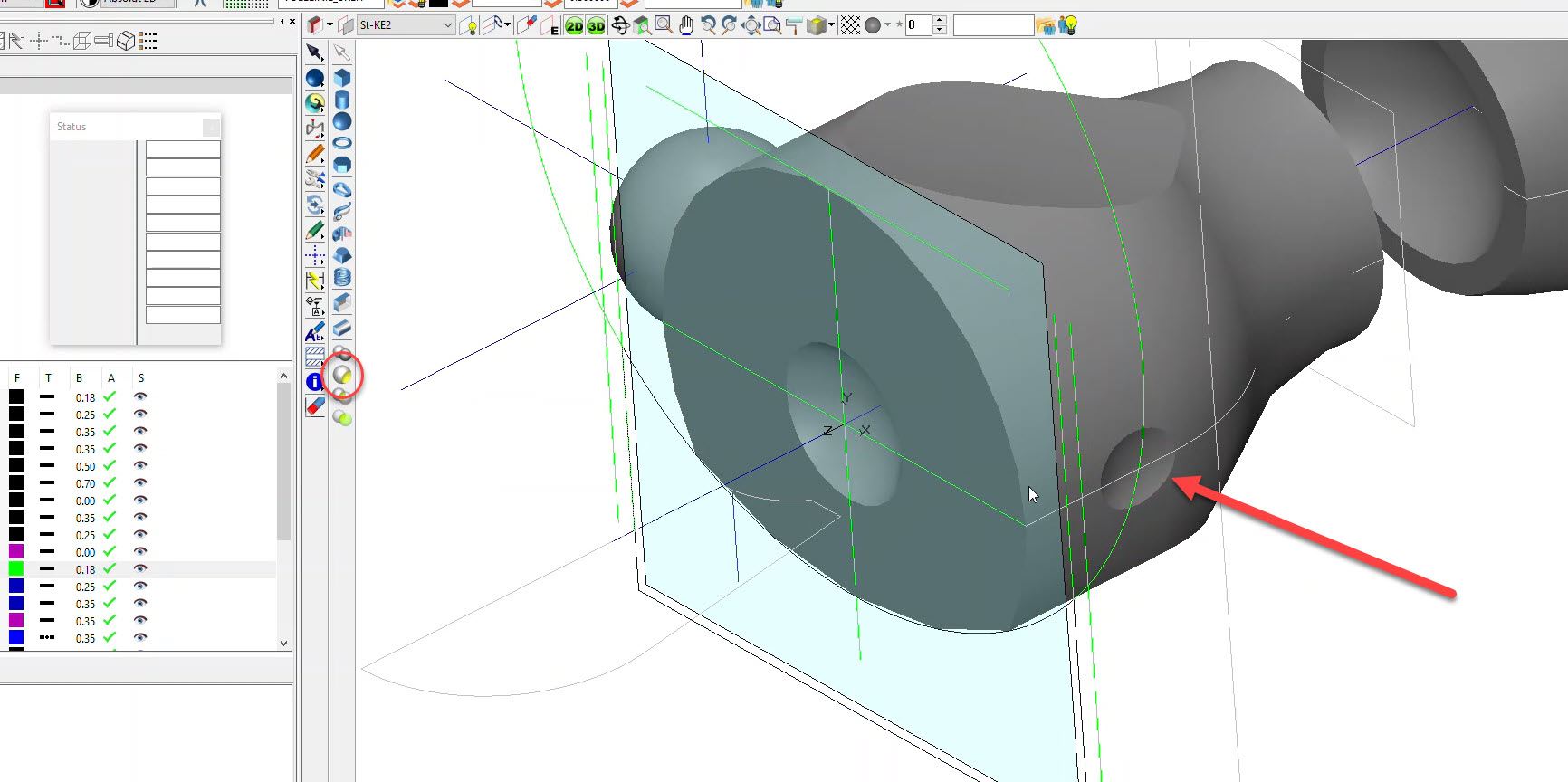
Der Kopf ist äußerlich fertig, doch fehlen noch die Augen. Diese werden aus zwei Kugeln mit einem Durchmesser von 10 Millimetern hergestellt, die einen Abstand von 15 Millimeter besitzen. Zudem müssen sie in der Z-Achse um acht Millimeter nach oben versetzt werden, damit eine Durchstoßung der Kopfform gegeben ist. Auch hier zeigt sich, dass eine vorherige 2D-Konstruktionszeichnung die Basis für eine gelungene Ausformung des Kopfes beziehungsweise der Augen bildet.
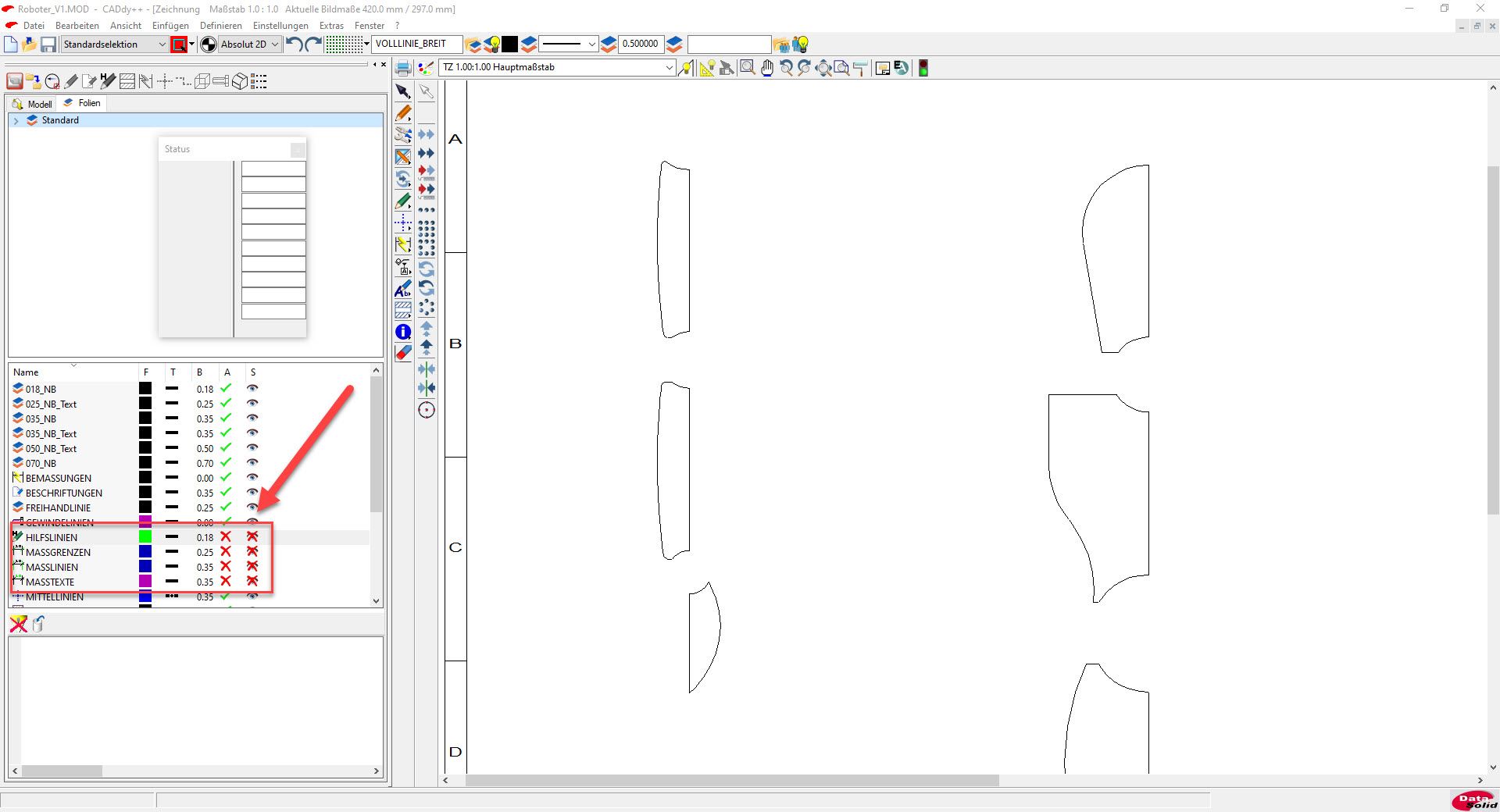
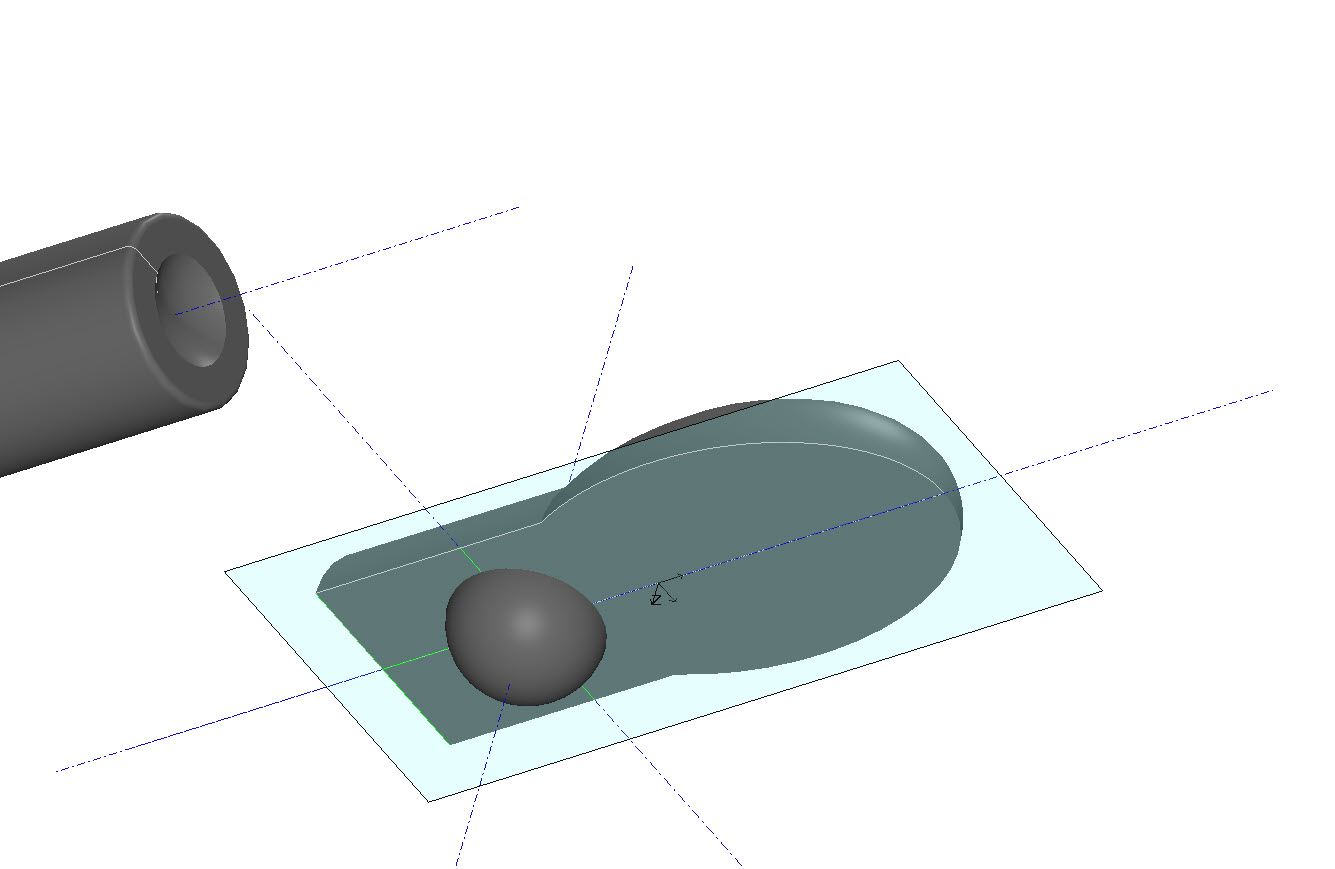
Damit die Augen problemlos platziert werden können, ist zunächst eine Konstruktionsebene an der Kopfunterseite anzubringen. Damit die nachfolgende Konstruktion der Hilfslinien problemlos vorgenommen werden kann, sind der Ober- und der Unterkörper des Roboters mittels der Funktion „Körper ausblenden“ auszublenden. Diesen Vorgang zeigt das untenstehende Video sehr ausführlich. Danach können die Kugeln für die Augen platziert werden.
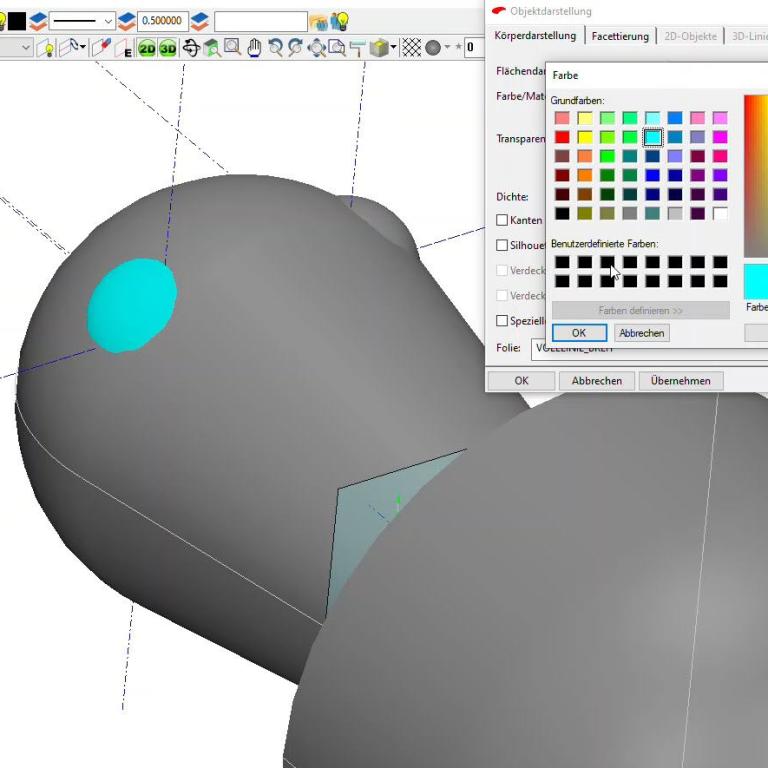
Das Verschieben wird über die Funktion „3D-Objekte transformieren“ vorgenommen. Dabei werden die Kugeln 27,3 Millimeter in Richtung Kopfmitte sowie acht Millimeter nach oben verschoben, wodurch sie an der richtigen Stelle aus dem Kopf austreten. Anschließend können diese Augen noch eingefärbt werden. Auch dieser Vorgang wird im Video deutlich gezeigt.
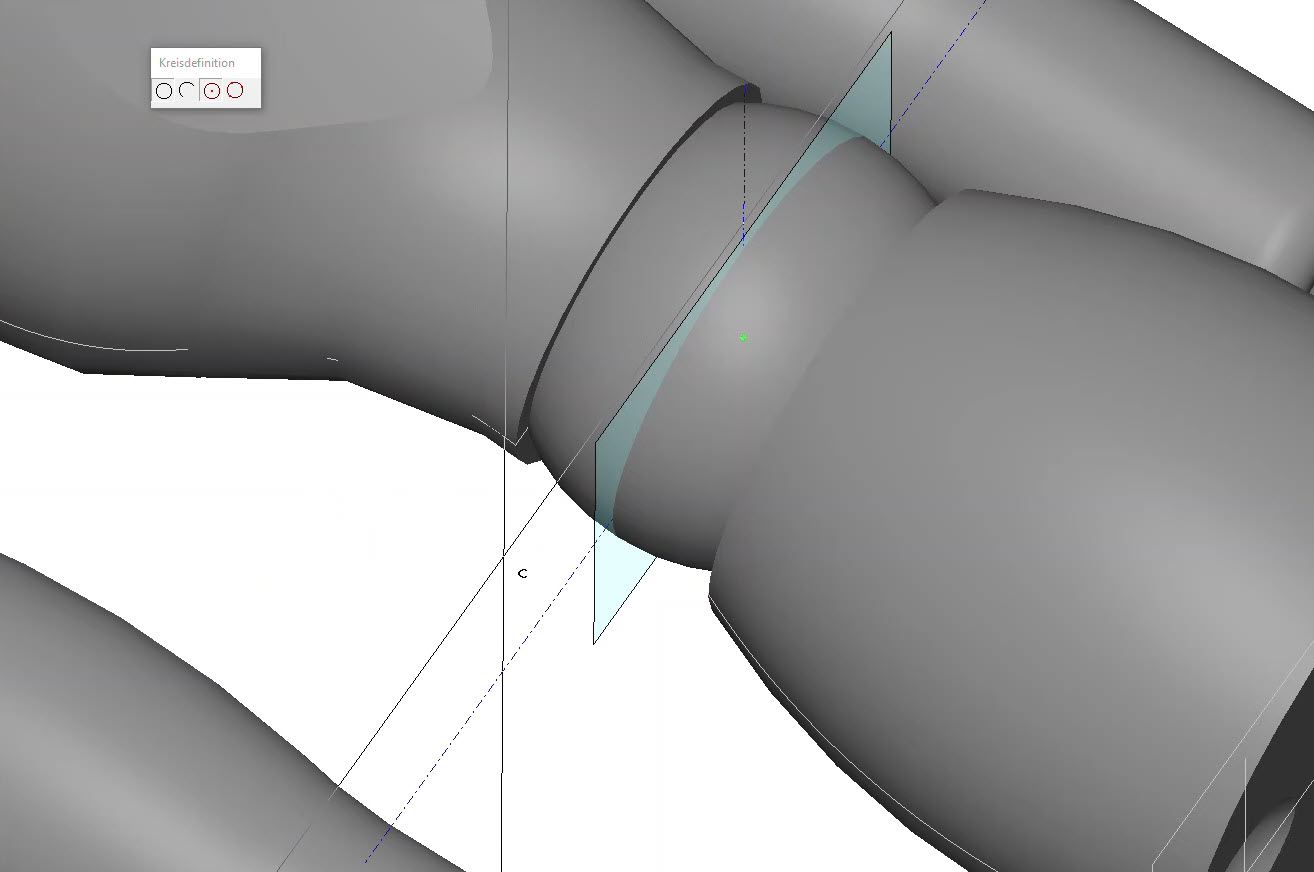
Nach diesem Schema können auch alle Kugeln erzeugt werden, die zu Arm- und Fußgelenken gehören. Wo keine Konstruktionsebenen vorhanden sind, müssen welche erzeugt werden. Diese können anschließend wieder entfernt werden.
Eine Alternative ist es, die Kugel im passenden Durchmesser zu erzeugen und mittels der Funktion „Körper neu positionieren“ zu platzieren. Wie das geht, ist im untenstehenden Video beschrieben.
Wichtig ist die Erkenntnis, dass Montagen im Fall fehlender 3D-Linien in manchen Fällen unmöglich sind. Dazu gehört die Aufgabe, eine Kugel an einer Hohlkehle zu platzieren. Ist dort keine 3DS-Linie vorhanden, so muss diese erzeugt werden, was im einfachsten Fall durch eine Dummy-Kugel geschieht. Dies bringt von Haus aus 3D-Linien mit, die für Platzierungen genutzt werden können. Wird die Dummy-Kugel nicht mehr benötigt, kann diese wieder gelöscht werden.
Damit ist der Roboter fertiggestellt und kann über die Funktion „Verschieben mit Kopie“ dupliziert werden. Auf diese Weise können verschiedene Varianten für unterschiedliche Zwecke erzeugt werden.